1、点焊机器人的特点
由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以点焊机器人的变压器必须尽量小型化。对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,工业上已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接,焊接参数由定时器调节。目前,新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。点焊机器人的焊钳,用电伺服点焊钳,焊钳的张开和闭合由伺服电机驱动,码盘反馈,使焊钳的张开度可以根据实际需要任意选定并预置,而且电极间的压紧力也可以无级调节。
电伺服点焊钳具有如下优点:
(1)每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机器人精确控制的,机器人在点与点之间的移动过程,焊钳就可以开始闭合;而焊完一点后,焊钳一边张开,机器人就可以一边位移,不必等机器人到位后,焊钳才闭合或焊钳完全张开后机器人再移动。
(2)焊钳张开度可以根据工件的情况任意调整,只要不发生碰撞或干涉,可尽可能减少张开度,以节省焊钳开度,节省焊钳开合所占的时间。
(3)焊钳闭合加压时,不仅压力大小可以调节,而且在闭合时两电极是轻轻闭合,可减少撞击变形和噪声。
2、弧焊机器人的特点
弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。
近年来,国外机器人生产厂都有自己特定的配套焊接设备,在这些焊接设备内已经插入相应的接口板,所以弧焊机器人系统中并没有附加接口箱。应该指出的是,在弧焊机器人工作周期中,电弧时间所占的比例较大,因此在选择焊接电源时,一般应按持续率100%来确定电源的容量。送丝机构可以装在机器人的上臂上,也可以放在机器人之外,前者焊枪到送丝机之间的软管较短,有利于保持送丝的稳定性,而后者软管校长,当机器人把焊枪送到某些位置,使软管处于多弯曲状态,会严重影响送丝的质量,所以送丝机的安装方式一定要考虑保证送丝稳定性的问题。
3、关节型机器人
关节型机器人的结构类同人的手臂,由几个转动轴,摆动轴和手爪等6~7个自由度组成。生产厂家主要有德国Manutec公司,德国KUKA,德国REIS,日本Motorman,日本Yaskawa和沈阳新松等。关节型机器人的转动轴和摆动轴主要用伺服电机配几乎没有反向间隙的精密减速机或直驱力矩电机驱动,而其控制系统其难度也很大。各个厂家的关节型机器人其结构类同,主要差别在技术参数,下面以德国Manutec公司的关节型机器人为例介绍。
Manutec公司型号为r15-30的关节机器人,额定负载30公斤,最大可达到 75 公斤,工作半径1.3 米,重复定位精度小于0.04 mm ,点到点的最大运行速度高达 5.9 m/s,加速度高达23 m/s2和工作寿命20 年。可以坐立式安装,可以是掉挂式安装,也可以与水平面小于30度角的斜式安装,不影响其各项技术指标。r15可以选配防爆式的,也可以选配一级洁净式等。
r15-30主要特点是强度大刚性好和重复定位精度高,主要应用领域是其它厂家的关节型机器人由于刚性和精度不够无法应用的领域,而用 5 轴加工中心成本太高或无法胜任的工作。如磨齿,异形铣削,壳(腔)内部铣削,磨,抛,切割和焊接等。
在手爪末端可以配力传感器,来加工异形表面(如铣削,磨和抛)。一个机器人也可以与双工作台及各种的双旋转轴协调同步运动。也可以是两个机器人协调同步工作,如一台机器人抓取工件,而令一台机器人对该工件进行加工,两台机器人同步协调完成特定的加工轨迹。
其它厂家的关节机器人主要应用在汽车焊接和装配等任务中。关节型机器人的优点是可以从不同角度不同方位来工作,速度快,工作效率高。但主要缺点是工作半径小,负载小,价格高,应用难度大和维护费用高。
作为关节机器人的简化型机器人SCARA就是两个摆动轴和一个上下运动轴,其特点是简单,经济,适合工作空间小,负载小、高速搬运。但它的价位高于直角坐标机器人,应用行业和数量非常小。
4、特种机器人
移动机器人就是能自主移动或上下楼梯的电动车,主要用于生产现场货物的自主运输和排险作业,或进入有污染和放射的环境内取样及监视等。还有一些移动机器人就是仿造一些动物,用腿和爪行走路的行走机器人,如美国的军用狗,还处于适用阶段。水下机器人与潜艇能自主潜入水下完成对海上钻井平台的水下建筑、发电站的水下闸门、海底打捞等工程的录像和监控。洁净式机器人主要是穿上防护衣的关节型机器人,使其自身有良好的密封性,不把灰尘带入工作现场,自身也不会产生灰尘,他们主要应用于电子器件,食品和药品等生产中。国际对洁净机器人的洁净度有明确的定义。军用机器人主要是小型移动车,遥控飞机或电子狗等,他们完成危险场所的一些作业,如排雷,布雷,现场监控,射击摧毁特定目标等。尽管目前服务机器人主要是玩具式的自治电动车,在其上面装有视觉和超声等装置使其可以在家里无碰撞移动,对不同位置进行照像,用来防盗,检测煤汽泄露,无线发送信息和接收指令,运输物品等等。但未来服务机器人的功能会不断增强,不断深入到人们日产生活的各个方面。还有手术机器人,航天机器人,挤牛奶机器人和核电站专用机器人等专用机器人。

5、直角坐标机器人
作为在各行各业中最广泛应用的直角坐标机器人,它主要是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴,一般X轴和Y轴是水平面内运动轴,Z轴是上下运动轴。在一些应用中Z轴上带有一个旋转轴,或带有一个摆动轴和一个旋转轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。
直角坐标机器人的组成
一个典型的直角坐标机器人,它由X轴,Y轴,Z轴及驱动电机组成。此外一个完整的机器人系统还需要控制系统和手抓,下面分别予以介绍:
直线运动轴: 也叫直线运动单元,它就是一个独立的运动轴,主要由支撑载体的铝型 材或钢型材和被安装在型材内部的直线导轨、运动滑块以及作为带动滑块做高速运动的同步带组成。
运动轴的驱动系统
直角坐标机器人的传动主要是通过驱动电机的转动带动同步带运动,同步带带动直线导轨上的滑块运动。当驱动轴的最高转速低于600转/分时通常选用步进电机,否则选用交流伺服电机。
直角坐标机器人的控制系统
机器人要在一定时间内完成特定的任务,比如每10秒内完成一次搬运工作。在完成抓取,加速运动,高速运动,减速运动,释放工件等同时,还要与相关的设备通过通讯或I/O口实现一些时序上的协调同步。另外在涂胶应用上,各个运动轴要完成直线和圆弧插补运动。因此其数控系统要按具体应用要求来选定其控制轴数、I/O口数量和软件功能。通常选用数控系统,plc,工控机加运动控制卡和带轴卡功能及I/O口的驱动电机来做控制系统。
直角坐标机器人的末端操作器——手爪系统
根据其具体应用情况,其手爪系统可能是气动吸盘、气动夹取手爪、电动夹取手爪、电磁吸取手爪、焊枪、胶枪、专用工具和检测仪器等。在很多场合可以一次抓取多个工件。
很多厂家已开发出一些标准的直线运动单元及其组合,下面结合德国百格拉公司的产品来介绍直角坐标机器人的技术数据及应用。
龙门轴直线运动单元
直线运动单元和驱动电机固定不动,而滑块运动,主要用于水平面和垂直面上长距离运动。有标准化产品PAS41,PAS42,PAS43和PAS44。对应的横截面尺寸是40*40 mm,60*60mm,80*80 mm和110*110mm,单根标准长度是6000 mm、负载是10~200公斤、重复定位精度0.05mm、最高运行速度8米/秒,加速度是每秒4米。
抓取轴直线运动单元
驱动电机和滑块固定在一平面上,直线运动单元本体运动,其导轨标准长度可达2400 mm。主要以垂直或水平进入工作空间,用于货物的抓取和搬运等。其标准化产品有LM-A001到LM-A808等,对应的尺寸是40*40 mm,60*60mm,80*80 mm到110*110mm,单根最大长度是3000 mm、负载是2~100公斤、重复定位精度0.05mm、最高运行速度8米/秒,加速度是每秒4米。
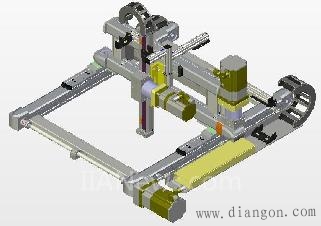
各种结构形式的2D和3D直角坐标机器人
利用标准的龙门式和抓取轴直线运动单元德国百格拉公司在过去的20多年中成功组合成了数百种结构形式,不同行程和负载能力,不同安装方式的机器人。其中针对不同应用要求还采取了多种加强形式来保证其强度,提高其变形能力,减少震动和晃动,提高寿命等。其常用的结构形式有龙门式,悬臂式,挂臂式和掉挂式等。
直角坐标机器人的主要结构形式及主要特点
但针对各种不同的应用,实际上可以方便快速组合成不同维数,各种行程和不同带载能力的壁挂式、悬臂式、龙门式或倒挂式等各种形式的直角坐标机器人。从简单的二维机器人到复杂的五维机器人就有上百种结构形式的成功应用案例。从电机到汽车等各行各业的自动化生产线中,也是各式各样的多台直角坐标机器人和其它设备严格同步协调工作。可以说直角坐标机器人几乎能胜任所有的工业自动化任务。下面是其主要特点:
◆任意组合成各种样式:每根直线运动轴最长是6米,其带载能力从10公斤到200公斤。在实际应用中已有近百种结构的直角坐标机器人,这些结构也可以任意组合成新的结构等。
◆超大行程:因为单根龙门式直线运动单元的长度是6米,还可以多根方便地级连成超大行程,所以其工作空间几乎没有限制,小到手机点胶机,大到18米长行程的切割机,8米长行程钻铣床,6米*6米*3米的检测机器人等。超大行程时要采用直线导轨和齿条传动方式。
◆负载能力强:单根直线运动单元的负载通常小于200公斤。但当采用双滑块或多滑块刚性联结时负载能力可以增加5到10倍。当把两根或四根直线运动单元并排接起来使用时,其负载可以增加2到4倍。当采用多根多滑块结构时其负载能力可增加到数吨。
◆高动态特性:轻负载时其最大运行速度可达到每秒8米,加速度可达到每秒4米。使其具有很高的动态特性,工作效率非常高,通常在几秒内完成一个工作节拍。
◆高精度:按传动方式及配置在整个行程内其重复定位精度可达到0.05mm~0.01mm。
◆扩展能力强:可以方便改变结构或通过编程来适合新的应用。
◆简单经济:对比关节机器人,直角坐标机器人不仅外观直观且构造成本低,编程简单类同数控铣床,易培训员工和维修,使其具有非常好的经济性。
◆胜任复杂任务:采用带有RTCP功能的五轴或五轴以上数控系统能完成非常复杂的喷涂,喷丸,检测,加工等任务。
◆寿命长:直角坐标机器人的寿命一般是10年以上,维护好了可达20年。
◆应用范围广:可以方便地装配多种形式和尺寸的手爪,可以胜任许多常见的工作,如焊接、切割,搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码和喷涂等任务。
|  电表怎么看度数
电表怎么看度数 插座烧毁原因_插座烧后还可以继续使用吗?
插座烧毁原因_插座烧后还可以继续使用吗? 注册电气工程师考试挂靠,到底富了谁?
注册电气工程师考试挂靠,到底富了谁? 电工证可以“挂靠“吗
电工证可以“挂靠“吗 电工证怎么考?如何自考电工证
电工证怎么考?如何自考电工证 电工证种类和图片大全
电工证种类和图片大全