|
����1. ȷ�����巽�� �������һ��ֱ������ϵͳ������Ӧ��Ϥ�ӹ�����Ҫ����������е�Ե���ϵͳ��������϶������Լ�ϵͳ�ľ�̬����̬����ָ���Ҫ���ۺϿ��Ǹ������أ�������ַ������бȽϣ����ѡ��ȷ��һ�����ʵķ��������Ϊ�ص��������������ϵͳ��Ƶ���Ҫ���⣬ֱ���趨Ϊij������е��ֱ������ϵͳ���һ����բ�ܹ����˫�ջ�ֱ�����ֵ���ϵͳ������װ�ò�������ȫ����ʽ��·������֪ϵͳ�Ķ�̬���ܼ�����Ҫ������ ������ϵͳ����Ƴɲ��ü�������Ƶ�ȫ����ʽֱ�����ֿ���ϵͳ����ˣ�Ҫ����������ڻ��������������㡢��ٶȵ����������Լ���ɾ�բ�����ִ������ƹ��ܡ� ���������ڻ�Ҫ��ȡ���������źš��ڱ����в��ý���������������Ϊ�������Ԫ�������Ľ��������źţ�����������ѹ���˲�����븺�ص����ɱ�����0��5V��ֱ����ѹ���پ�A/Dת������ģ���ѹת���������������������� �����ٶ��Ҫ��ȡת�ٷ����źš��ɲ��ò��ٷ������Ϊ�ٶȼ��Ԫ�������ٷ�����������ѹ����ѹ���˲�����ͨ��A/Dת�����õ�ת�ٵ������������ַ�����ȱ���Dz��ٷ�����������������ͷ������Լ�ת�����˲���·����������ʱ�͡���ˣ������в����������巢������������������Ϊ�ٶȼ��Ԫ����ͨ����������ʱ�������ɵõ�ת�ٵ������źš���ѡ��ÿת����Tn��������������巢����������ת��Ϊn(rpm)ʱ��ÿ�����Tn��n/60�����塣��ʱ������60/Tn��Ϊ�����������м���������������ö�Ӧ�綯��ÿ���ӵ�ת�١� ������ϵͳ���ɼ������ʵ�־�բ�����ִ������ܡ������ִ�����ȡ��ģ�ⴥ������·������������߾�բ�ܴ����Ŀɿ��ԡ�����ԣ����һ�Ϊ��һ����ߴ������Ⱥ�ʵ������ϵͳ�Ķ�ܡ����ܻ��ṩ�˱�Ҫ�������� �������Ͽ��ǣ��ɻ�����ϵͳ����ɴֿ�ͼ��ͼ1��ʾ�� ���� 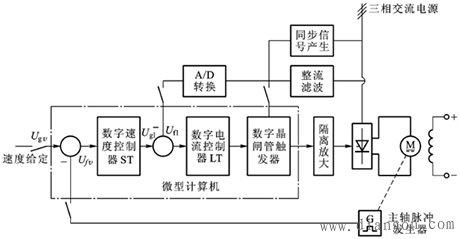 ����������������������������ͼ1 ˫�ջ�ֱ�����ֵ���ϵͳ ����2. ���������ٶȻ����ֿ�������� �������ֿ���������Ƽȿ��Բ���ģ�⻯��Ʒ�����ƣ�Ҳ���Բ���ֱ����Ʒ�����ơ��������ģ�⻯��Ʒ����Ե��������ٶȻ����ֿ�����������ơ� �������ڵ��������������ٶȻ�������������PI����������˿��Ա���һ��PI�����ӳ�����ǰ���йز�����ƫ��������Ӧ��Ԫ�����������ɹ���һ���ӳ���PI�����ӳ�������ͼ��ͼ2��ʾ�� ����  ����ͼ2 PI�����ӳ�������ͼ ����3. ��բ�����ִ�������� ������ ���ִ���������������� ������բ������ȫ����ʽ������·���ߵ�ѹ������ͼ3��a����ͼ3��b����ʾ��t1��t6Ϊ��Ȼ����㡣ȡ�ߵ�ѹucb�Ӹ��벨�����벨�Ĺ���㣨t1����Ϊͬ�����㡣���ݲ���ͼ�ɷ���������բ�ܵĴ���ʱ�̣���Ӧ�ڿ��ƽǦ���0�㣩������˳����ͼ4��ʾ�� ���� 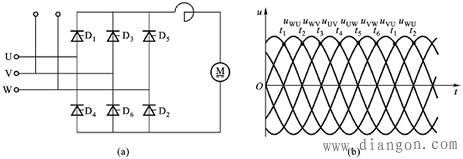 ���������������� ͼ3 ����ȫ����ʽ������·���ߵ�ѹ���� ���� 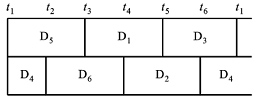 ��������ͼ4 ��բ�ܵĴ���ʱ�̣�����0�㣩������˳�� ����������Ե���������������������м��㣬��ͬ������Ϊ�ο��㣬�����բ�ܿ��ƽǦ��Ĵ�С����ͨ����ʱ���������Ǵ�С��ͼ8.6��˳��ȷ�ĸ�������բ�ܷ����������壬��������ִ����������� ����Ŀǰ�����ִ�������Ҫ�����ࣺ���Դ�����ʽ����Դ�����ʽ����ν���Դ�����ʽ����ָ���������γɵ�ʱ�̶�ȡ������Ȼ����㣨��ʱ�̵㣩����Դ�����ʽ����ǰһ��������Ϊ����ȷ����һ��������ʱ�̵ķ������üӳ��������������δ�������֮��ļ�����ı���ƽǡ�����̬ʱ�����������60�㣬�������˲ʱ��С�����Ӿ���Ӧ�ؼ�С�����ӿ��ƽǡ����������ּ������������γ�����ۻ������⣬����Ƶ�ʵIJ�����ԭ�����ʹ���ƽ�ƫ��Ҫ��ֵ����ˣ�����Դ�����ʽ�£���Դ��ѹ��һ�������ڣ���Ҫͬ�������ź�У��һ�Σ��Ա��������ۡ� �����������þ��Դ�����ʽ������ִ�������һ�ַ����� ������ �����㷨�� ���������Ǧ����ͺ���Ȼ�����ĽǶȡ�Ϊ����һ����ʱ����ɶԴ����ǵĶ�ʱ����ʱʱ�䲻�ܳ���3.33ms�����ԣ�������һ���µı���������Ϊ��ʱ�Ƕȣ��䶨�����£� ���� 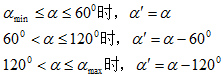 �������Ц�min�ͦ�m��x�Ǵ����ǵ���Сֵ�����ֵ�� ������ �������� ��������ȫ����ʽ������·�����ѹ�գ�����ƽǦ�֮��Ĺ�ϵ ���� ��������E2Ϊ��ѹ�����β����ѹ��Чֵ�� ����������������ڳ�Ϊһ���Ŵ�ϵ��ΪKs�����Ի��ڣ��� ���� �������� �������� �����ɴ˿ɼ�����ʹ����������֮������Թ�ϵ����ʹ�������֮���Ϊ�����ҹ�ϵ���Ϳ�ʹ�����ѹU������Ƶ�ѹ����֮�䱣�����Թ�ϵ�� ��������һ������ֵ������ʽ�����һ������Ϊ�������ʵʱ����Ҫ���������������������ж�Ӧֵ���гɱ�������ڴ棬������ݱ��ͳ�Ϊ�������������趨��������ַΪ����ַ���Կ��Ƶ�ѹ����Ϊ������ַ��������Ӽ��ɵõ�ijһ���Ƶ�ѹ�����Ħ�ֵ�� ������ �������� �������ִ�����Ҫ����ͼ4�����Ĵ���˳��˳�η����������塣Ϊ�������������һ����������������ʱ����ʱ��ʱ�䵽ʱ����ʱ�������ж����룬���жϷ�������������������ȡ�����ݣ���I/O���ͳ���������̬�������γɿ���Լ1ms�����壬�پ������롢���ʷŴ����ͨ�������ѹ���������բ�ܴ������� ����4. �ͼ����ѡ�� �����Ը���������ѡ����ֻ��ͺ��ʣ���������Ψһ�ġ��ⲻ���м����ϵ����⣬����һЩ�����������ƣ������ȴӼ����Ͽ��ǣ�Ҫ�ܹ��������ϵͳ������Ŀ���Ҫ��ϵͳҪ���ͼ������ɵ��������ٶȻ��ķ����źŲ����������Ϳ����㷨���㣬�Լ���բ�ܵ����ִ������Ƶȹ��ܡ����У��������Լ����ִ�������Ҫ�������Ӧ���ɼ����ͼ�������е��������൱���ء������Ҫ����һ�ֲ���Intel8086���������ɵ�ȫ����ʽֱ������ϵͳ�Ŀ��Ʒ�������ԭ����ͼ5��ʾ�� ������ϵͳ��Ҫ��8086CPU������I/O�ӿ�8255A���ɱ���жϿ�����8259��ͬ���źŵ�·��A/Dת�������Լ�ʱ�ӵ�·����������������ɡ� ���� 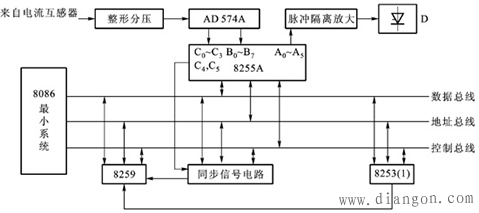 ����ͼ5 ����Intel8086���������ɵ�ȫ����ʽֱ������ϵͳ ����5. ϵͳ������� ����ϵͳ������Ƶ��������ݡ�Ҫ����ڱ��µ�һ�������˽��ܡ�������Ա�ϵͳ���з�������ơ� �������ȿ��ǵ����������������ź��辭ģ��������ͨ��������������һͨ������Ҫ��ɲ����ǽ�����������������������ѹ���˲���·��A/Dת���������ǵ����ļ�⾫�ȣ���ϵͳѡ��12λA/Dת��������ͨ��8255A��B0��B7��C0��C3����������������� ������ο����ٶȻ����ٶȷ������Ԫ����ÿת����1024��������������巢��������ǰ���֪����T=60��1000/1024��58.6msΪ�����������м�������õ��ļ���ֵ�������綯��ÿ����ת���� �����������������ִ�������ͬ���źŵ�·�����ִ������ĺ��IJ��֣���ԭ����ͼ��ͼ6��ʾ����ͬ����ѹ��ȡ��ͬ���ź�ucb(ͼ7a)������LM339�Ƚ����õ�����Ϊ20ms�ķ����źţ�ͼ7b����ͬ�����壨ͼ7c����Ϊ��������·��Դ��ÿ����Ȼ�����ͬ����������Ϊ20ms��ͬ�����������ز�����һ��IR3�ж����룬CPU��Ӧ��һ��IR3�жϺ�ʹ8253#1��������Ϊ3.33ms�ķ����ź�(ͼ8.9d),�����Ϳ��Բ����ڶ��������ε�IR3�ж�����,����ÿ��IR3�ж϶���������·��Դ��ÿ����Ȼ�����ͬ���� ���� 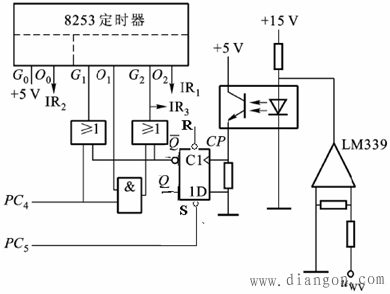 ������������������������ͼ6 ͬ���źŵ�· ����Ϊ�˼���8253#1�Ļ�������ÿ��ѭ���ĵ�һ��IR3�жϺ�Ҫ��������8253#1��ʱ�䳣���������ڵ�һ�κ͵�����IR3�жϺ���PC4��PC5Ϊ��Ӧ��״̬�Ա����ѭ���������Ǧ���IR3������������8253#2��ʱ������ʱ����ʱO2����ߵ�ƽ������IR1�ж����룬��IR1�жϷ����У�CPUͨ��8255A��A�������Ӧ�Ŀ����֣�������Ӧ�ľ�բ�ܣ�ͬʱ����8253#0��ʱ����8253#0��ʱ����ʱ������IR2�ж����롣��IR2�жϷ����У�CPU���������00H���Ӷ�����˫խ���塣 ���� 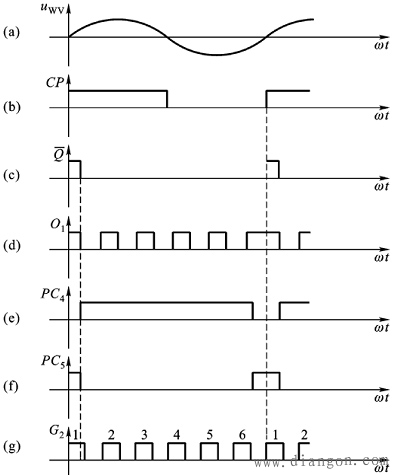 ��������������������������ͼ7 ��������ʱ���� ���� �����CPU��ʱ���š�ϵͳ����ʱ�������Ҫ������������CPU��һ��ʱ��ֻ��ִ��ijһ�ֲ�������ˣ�������Ч����CPUʱ���Ƿdz���Ҫ�ġ���ϵͳ��������ж�IR1��IR5���жϼ���ΪIR1<IR2<IR3<IR4<IR5��IR1Ϊ��ʱ�����ǵ��жϣ���̬ʱ3.3ms����һ�Σ�IR2Ϊ����˫խ������жϣ���̬ʱ3.3ms����һ�Σ�IR3Ϊ���������͵��������ڼ�����жϣ�3.3ms����һ�Σ�IR4Ϊ�ٶȼ����жϣ�58.6ms����һ�Σ�IR5Ϊ�ٶȻ����ڼ�����жϣ�10ms����һ�Ρ� ����6. ϵͳӲ����������� ����ϵͳ����ԭ����ͼ��ͼ5��ֻ�ǻ�����ϵͳӲ�����ɵļ�ͼ��Ӳ�����Ҫ����Щ��ͼ������з�������ƣ��еIJ��ֿ��ܻ�Ҫ�����м����飬�����ϸ��ϵͳ����ԭ��ͼ��ͨ����Ӳ��������ڵ��������Ƭ���Ļ����ϣ�����ϵͳ�����ͼȱ�ٲ��ּ������䡣��ϵͳ����TP86A���������������ģ����õ��������Ǵ�ұȽ���Ϥ��ͨ����������ˣ�����ϵͳ����ԭ����ͼ��������ԭ��ͼ�Dz����ѵģ����ﲻ�ٻ����� ������ϵͳ����Ҫ���ƹ������жϷ��������ɣ����������������д�������������ΧоƬ�趨�ͳ�ʼ�������������������洢��Ԫ���趨����IR1�жϳ����������IR2��ʱ���������������IR2�жϳ���������00H����������IR3�жϳ�����ɵ������������������ڼ��㼰�����Ǧ��ļ��㣻IR4�жϳ�������ٶȼ������IR5�жϳ�������ٶȻ����ڼ������� ����7. ϵͳ���� �������Ӳ���������ķֲ���װ�����ơ�����֮��Ҫ��������������Ҫ�ֲ����С����ִ����������DZȽ϶����IJ��֣����ȵ�������ͨ����Ȼ���ٺ͵��������ٶȻ������� ����������һ��ϸ�µĹ��������ڲ�������ѡ��Ƿ�ѡ�������ֵ���ȵ�ԭ��һ��ϵͳ���������ﵽҪ��Ķ�����̬Ʒ��ָ�꣬����ϵͳ�Dz��ȶ��ġ����ݵ��Գ��ֵ������ϵͳ���з�������ϸ�����������ڵ��Թ����У����۷�������Ҫ�ģ��������벻���Դշ����������ԡ���������Ҫ��֤ϵͳ�ȶ���Ȼ���ٱ�֤������̬���ԣ�����������ϵͳҪ��Ϊֹ�� |
 ���ü��������ϵͳ
���ü��������ϵͳ ���������ϵͳ�Ļ�������ԭ��
���������ϵͳ�Ļ�������ԭ�� PC6313�ɼ�����ʹ��
PC6313�ɼ�����ʹ�� PC-6313 �ɼ������ܲ�������װʹ��ע������
PC-6313 �ɼ������ܲ�������װʹ��ע������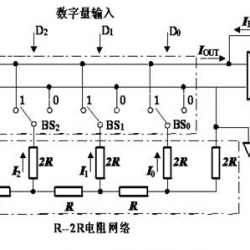 D/Aת��������ԭ��������ָ��
D/Aת��������ԭ��������ָ�� ģ�������ͨ����������ɼ�����������ʽ
ģ�������ͨ����������ɼ�����������ʽ�繤ѧϰ�� ( )
GMT+8, 2021-12-6 20:44