|
试凑法是通过模拟或实际的闭环运行情况,观察系统的响应曲线,然后根据各调节参数对系统响应的大致影响,反复试凑参数,以达到满意的响应,从而确定PID控制器中的三个调节参数。其中在实践中总结出如下的规律: (1)增大比例系数Kp一般将加快系统的响应,在有静差的情况下有利于减小静差。但过大的比例系数会使系统有较大的超调,并产生振荡,使系统的稳定性变坏; (2)增大积分时间TI一般有利于减小超调,减小振荡,使系统更加稳定,但系统静差的消除将随之减慢; (3)增大微分时间TD亦有利于加快系统的响应,减小振荡,使系统稳定性增加,但系统对干扰的抑制能力减弱,对扰动有较敏感的响应;另外,过大的微分系数也将使系统的稳定性变坏。 在试凑时,可以参考以上的一般规律,对参数的调整步骤为先比例,后积分,再微分,即: (1)先整定比例部分:将比例系数KP由小调大,并观察相应的系统响应趋势,直到得到反映快、超调小的响应曲线。如果系统没有静差或静差已小到允许范围之内,同时响应曲线已较令人满意,那只须用比例调节器即可,最优比例系数也由此确定。 (2)如果在比例调节的基础上系统的静差不能满足设计要求,则须加入积分环节。整定时一般先置一个较大的积分时间系数TI,同时将第一步整定得到的比例系数KP缩小一些(比如取原来的80%),然后减小积分时间系数使在保持系统较好的动态性能指标的基础上,系统的静差得到消除。在此过程中,可以根据响应曲线的变化趋势反复地改变比例系数KP和积分时间系数TI,从而实现满意的控制过程和整定参数。 (3)如果即使有比例积分控制器消除了偏差,但动态过程仍不尽满意,则可以加入微分环节,构成PID控制器。在整定时,可先置微分时间系数TD为零,在第二步整定的基础上,增大微分时间系数TD,同时相应地改变比例系数KP和积分时间系数TI,逐步试凑,以获得满意的调节效果和控制参数。 值得一提的是,PID三个参数可以互相补偿,即某一个参数的减小可由其他参数增大或减小来补偿。因此用不同的整定参数完全可以得到相同的控制效果,这也决定了PID控制器参数选取的非唯一性。另外,对无自平衡能力的对象,则不应包含积分环节,即只可用比例或比例微分控制器。在实时控制过程中,只要被控对象的主要性能指标达到了设计要求,就可以选定相应的控制器参数为最终参数。表1给出了常见的PID控制器参数的选择范围。 表1 常见被控量的PID参数选择范围 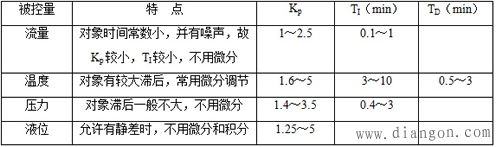 |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项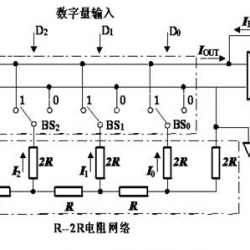 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式电工学习网 ( )
GMT+8, 2021-12-6 20:44