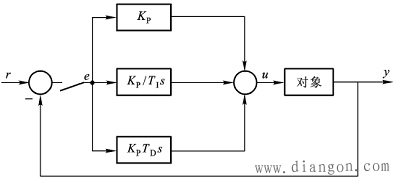
 图1模拟PID控制 这里,PID控制器的离散化,下两节分别讨论PID算法改进和参数整定过程。 PID控制器是一种线性调节器,这种调节器是将系统的给定值r与实际输出值y构成的控制偏差e=r-y的比例、积分、微分,通过线性组合构成控制量(如图5.10所示),所以简称P(比例)I(积分)D(微分)控制器。 连续控制系统中的模拟PID控制规律为 式中,u(t)是控制器的输出,e(t)是系统给定量与输出量的偏差,KP是比例系数,TI是积分时间常数,TD是微分时间常数。 相应的传递函数为 下面分别介绍比例调节器、积分调节器和微分调节器的作用: (1)比例调节器:比例调节器对偏差是即时反应的,偏差一旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数KP。比例调节器虽然简单快速,但对于系统响应为有限值的控制对象存在静差。加大比例系数KP可以减小静差,但是KP过大时,会使系统的动态质量变坏,引起输出量振荡,甚至导致闭环系统不稳定。 (2)积分调节器:为了消除在比例调节中的残余静差,可在比例调节的基础上加入积分调节。积分调节具有累积成分,只要偏差e不为零,它将通过累积作用影响控制量u,从而减小偏差,直到偏差为零。积分时间常数TI大,则积分作用弱,反之强。增大TI将减慢消除静差的过程,但可减小超调,提高稳定性。引入积分调节的代价是降低系统的快速性。 (3)微分调节器:为加快控制过程,有必要在偏差出现或变化的瞬间,按偏差变化的趋向进行控制,使偏差消灭在萌芽状态,这就是微分调节的原理。微分作用的加入将有助于减小超调,克服振荡,使系统趋于稳定。 计算机控制系统是一种采样控制系统,其只能根据采样时刻的偏差值计算控制量。因此,利用外接矩形法进行数值积分,一阶后向差分进行数值微分,当选定采样周期为T时,有 如果采样周期足够小,这种离散逼近相当准确。上式中,ui为全量输出,它对应于被控对象的执行机构第i次采样时刻应达到的位置,因此,该式称为PID位置型控制算式。 可以看出,按上式计算ui时,输出值与过去所有状态有关。当执行机构需要的不是控制量的绝对数值,而是其增量时,由上式可导出下面的公式: 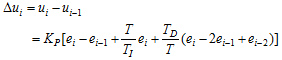 (4 (4式(4)称为增量型PID控制算式。该式还可以写成 式(5.22)称为递推型PID控制算式。增量型控制算式具有以下优点: (1)计算机只输出控制增量,即执行机构位置的变化部分,因而误动作影响小; (2)在i时刻的输出ui,只需用到此时刻的偏差,以及前一时刻,前两时刻的偏差ei-1,ei-2和前一次的输出值ui-1,这大大节约了内存和计算时间; (3)在进行手动-自动切换时,控制量冲击小,能够较平滑地过渡。 控制过程的计算机要求有很强的实时性,用微型计算机作为数字控制器时,由于字长和运算速度的限制,必须采用必要的方法来加快计算速度。下面介绍简化算式的方法. 按照式(5)表示的递推型PID算式,计算出每输出一次ui,要作四次加法,两次减法,四次乘法和两次除法。若将该式稍加合并整理写成如下形式: 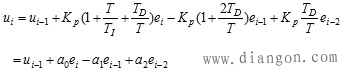 (6) (6)其中 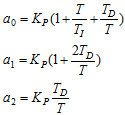 可以离线算出,即可加快算法程序的运算速度。 按上式编制的数字控制器的程序框图如图2所示。 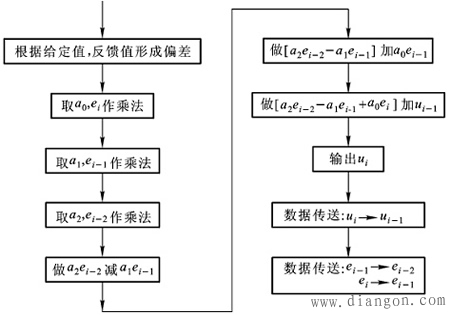 图2 递推型PID控制器程序框图 |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项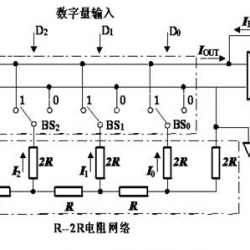 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式电工学习网 ( )
GMT+8, 2021-12-6 20:44